记一次background fuse mount问题的解决过程
blobfuse2 是微软开源的使用 golang + libfuse 实现的fuse 文件系统。blob csi driver 是其对应的csi driver实现。我们最近碰到了两个background fuse mount引发的问题,最后定位到了是相同根因并解决:在PR#1088里分析了问题原因和解决办法,这里也记录一下整个过程。
问题现象
我们先后碰到了两个问题,问题现象不同,但是是由同一个根因造成的:
-
问题一: 执行
blobfuse2 mount挂载实际失败,但没有在终端或者日志里提示任何错误信息,而且errno返回为0: #1081。这导致blob csi driver将Pod目录挂载到了本地盘。 -
问题二:删除使用了blobfuse2作为挂载点的Pod后,新创建出来的Pod数据丢失:#1079。
-
这个问题首先查到的原因是:在删除老Pod时,执行
NodeUnPublishVolume阶段,unmount bind mountpoint时,会将source mountpoint,也就是blobfuse2的mount point也一并unmount掉。这样就会导致在新Pod创建时,执行NodePublishVolume阶段,bind mount的source mountpoint其实是本地文件系统。 -
进一步分析时,在创建老Pod阶段,进行
NodePublishVolume时,目录其实被同时bind mount到了fuse和ext4两个文件系统里:
-
而unmount这种mountpoint时就会导致source mountpoint也被unmount掉。虽然不知道这个行为背后的原因是什么,但是问题的根因还是在于bind mount时不应该同时mount到两个不同的文件系统路径。
-
问题原因
libfuse提供了-f参数来决定是否要让用户态的fuse进程运行在foreground。默认是以background模式运行 —— 即父进程fork出子进程然后退出,子进程被1号进程接管。
blobfuse2是基于golang实现的,通过cgo调用libfuse库函数,但是golang没法很好的支持fork,实际测试时发现如果blobfuse2直接依赖libfuse库中的fork来启动子进程,任何文件系统的读写命令都会被卡住且无法退出。blobfuse2借助了开源项目go-daemon来实现在golang中fork。我会在下一篇博客中分析一下go-daemon的源码。
具体的做法(代码在这)是在start fuse之前,通过go-daemon的Reborn()函数fork出子进程,然后子进程以foreground方式start fuse:

并且父进程退出:
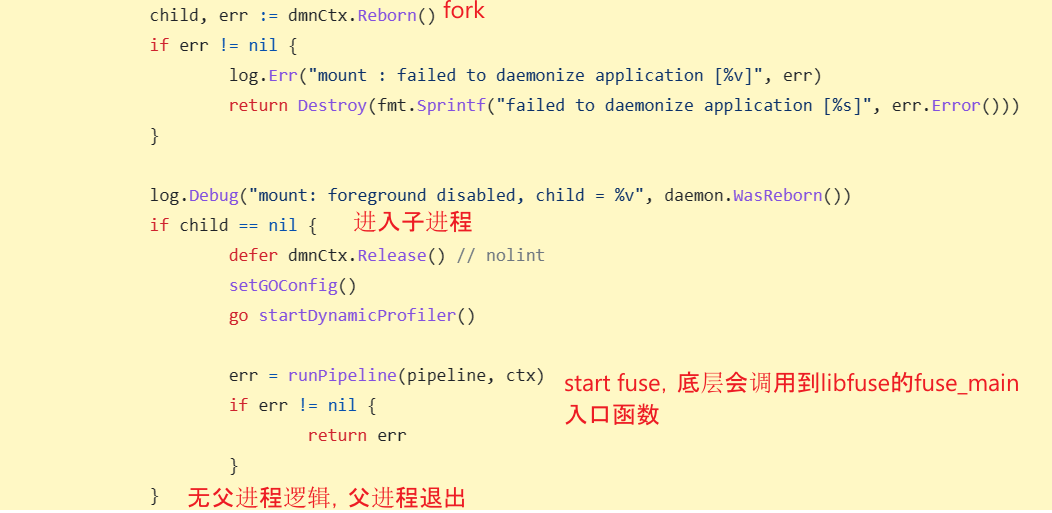
这样做会导致问题的原因是,其实libfuse在daemonize fork之前还有很多逻辑,其中就包括fuse mount:
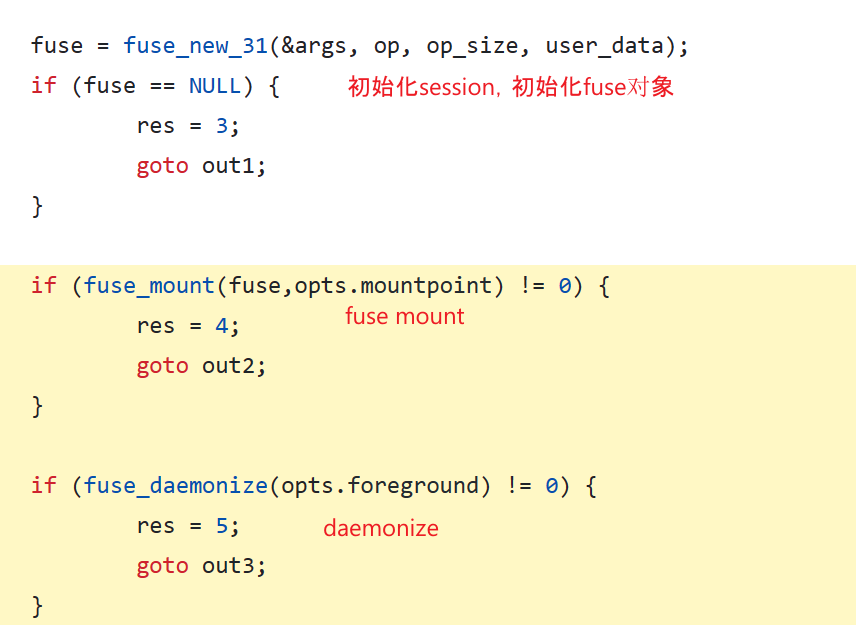
也就是说执行daemonize之前很可能发生其他错误导致fuse mount直接报错退出。
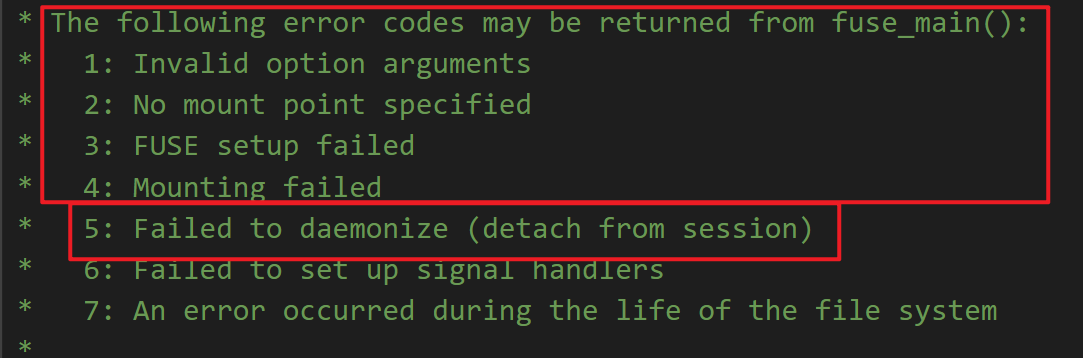
但是现在blobfuse2的fork发生在libfuse的入口点fuse_main之前了,而且父进程过早的直接退出了,这就导致fuse daemonize之前发生的错误都无法被父进程捕捉到。这也就是为什么执行blobfuse2 mount操作即使mount失败了,也不会报错。
第一个问题的原因已经清楚了。
第二个问题的原因也是异步mount导致的:创建Pod时,在NodeStageVolume阶段,blob csi driver会调用blobfuse2 mount执行fuse mount操作。blobfuse2 mount虽然返回成功了,但是实际上mount操作还在子进程中异步的执行。
而csi driver认为blobfuse2 mount返回成功了就代表fuse mount成功了,因此也返回执行成功的response。接着kubelet会调用NodePublishVolume执行bind mount,但在bind mount时,其实fuse mount仍在进行中,因此首先bind mount到了还未fuse mount成功的ext4文件系统上,等到fuse mount成功,目录被初始化为fuse文件系统,又bind mount到了fuse文件系统上,这就是为什么会同时bind mount到两个文件系统上。
调研
因为golang的fork的限制,上述问题只会在使用golang的fuse项目中出现。
cgofuse也是一个通过cgo+libfuse实现的fuse项目,只支持foreground fuse mount:

blobfuse v1和s3fs-fuse都是用c++写的,直接调用libfuse的fuse_main,没有问题。
解决方案
搞清楚了libfuse底层原理,解决方案似乎很容易想到了,这就是一个父子进程间IPC的场景,但是实际上要完全解决还是要想一些办法的。
第一个要解决的问题是父进程如何知道子进程mount失败。子进程mount失败时是会导致进程退出的,因此只要能捕获子进程退出事件即可。直接在父进程中使用wait或者监听SIGCHLD信号都可以。
第二个问题是,子进程异常退出时,父进程没有在终端和日志里打印错误信息。libfuse默认是直接将错误日志输出到stderr,那么我们将子进程的stderr重定向输出到父进程即可。如果是通过直接fork产生的子进程,因为父子进程共享open fd,因此只需要在父进程中创建PIPE,然后在子进程中把stderr重定向到PIPE的write fd,并在父进程从PIPE read fd读就可以了。可是go-daemon其实是先fork,然后exec覆盖子进程,父子进程并不共享open fd,所以子进程创建出来后是拿不到父进程创建出的PIPE fd的。所以得绕一下,最后想到的办法是,先在父进程创建PIPE,然后在创建子进程的时候直接设置子进程attribute,将他的stdout/stderr设置为PIPE write fd。这个功能go-daemon还不支持,顺手做了一下:https://github.com/sevlyar/go-daemon/pull/90。
现在父进程能感知到子进程mount失败的事件了,但是父进程还需要能感知子进程mount成功的事件才行,这样父进程才可以安全的退出。但是fuse mount成功后是不会以任何形式通知父进程的,除非修改libfuse代码,所以这里碰到了一些困难。在看了libfuse的代码之后,最后想到了如下的解决办法:
libfuse提供了很多callback钩子函数,涵盖了所有的文件系统命令。简单来说,就是用户在执行cd,ls,rm, mkdir等文件系统命令时,kernel会调用相应的callback与用户态fuse进程通信,blobfuse2也注册了很多对应的callback。libfuse在mount成功后kernel自动执行的第一个callback是init,用于初始化文件系统。所以最后想到的解决办法就是当用户态的fuse进程在执行init callback时,给父进程发送一个SIGUSR1的信号,当父进程收到这个信号,就知道fuse mount阶段肯定成功了,可以成功退出了。